Real-time Map Feedback Coverage for 3D Reconstruction using Drone
Coverage control with real-time mesh feedback using UAVs for 3D reconstruction. 

Coverage control with real-time mesh feedback using UAVs for 3D reconstruction.
Coverage control algorithm for multiple UAVs to be used in 3D map reconstruction applications. 
Drone coverage control methods for dynamic target tracking applications by adapting the drone’s altitude and detection model in real-time. ![]()
Control methods for autonomous ship operation in a port with safety certificates using a combined approach of Model Predictive Control (MPC) and Control Barrier Function (CBF). 
Multi-Robot Task Allocation algorithm for multiple UAVs and UGVs for radiation monitoring application in a thermosolar plant. 
Autonomous Hybrid Underwater Glider (HUG) for long-distance surveillance missions. Underwater autonomous platform that combined movement of AUV (Autonomous Underwater Vehicle) and AUG (Autonomous Underwater Glider). 
Low cost underwater vehicle with controlled buoyant mechanics and moving mass mechanism. 
Deep learning-based classifier for diabetic retinopathy severity grading. 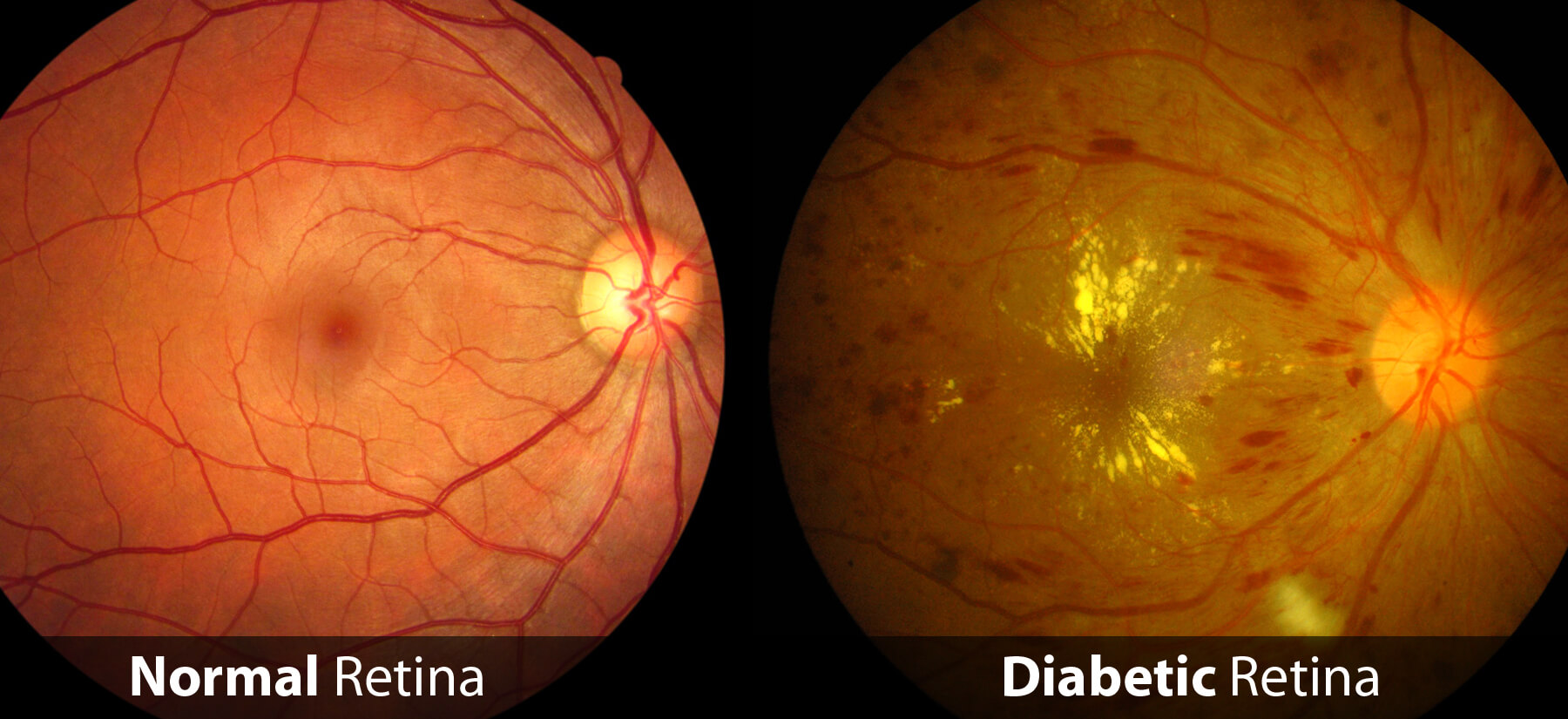
Deep learning-based classifier for brain tumor detection. 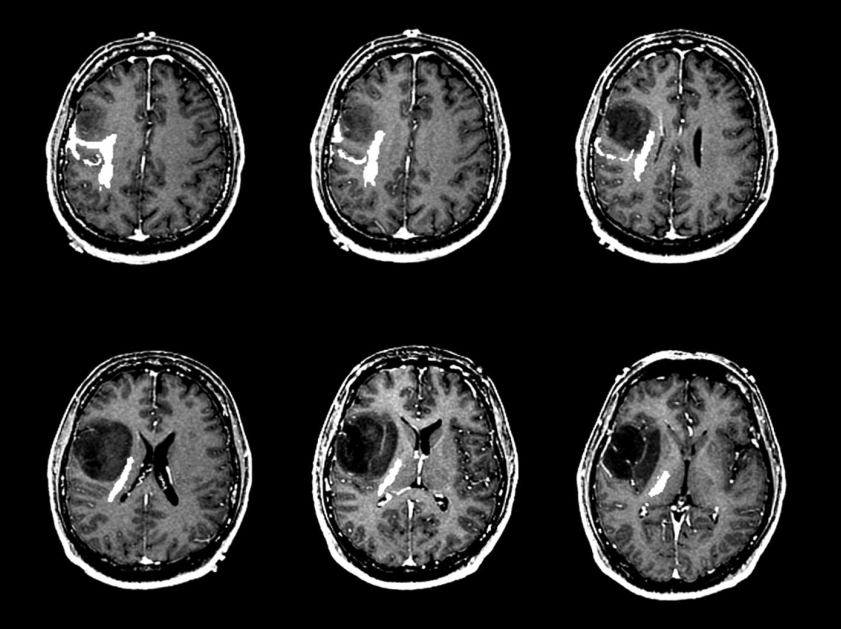
Development of HALE (High Altitude Long Endurance) UAV with a wingspan of 21 meters. 
Early preparation before flying the HALE UAV involved flying a mini-UAV with a wingspan of 1.5 meters to an altitude of 10,000 feet above ground level. The UAV was equipped with a weather monitoring device as well as a real-time video monitoring system. 
Compact and easily deployable fixed-wing unmanned aerial vehicle which can be launched from tube. 
Hybrid fixed-wing UAV with vertical take-off and landing capability.