
Angle-Aware Coverage Control for Large-Scale Map Reconstruction using Drone Networks
Short Summary
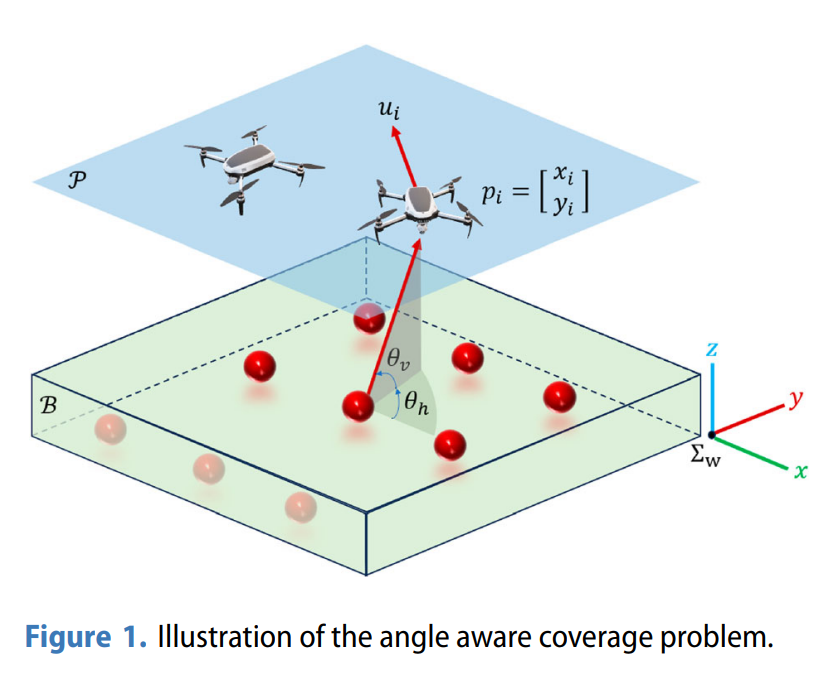
This work presents a novel angle-aware coverage control method that integrates Voronoi-based coverage as the nominal input into the quadratic programming problem required to solve the original angle-aware coverage control, aimed at improving monitoring efficiency in large-scale 3D map reconstruction using drone networks. The approach ensures diverse viewing angles, enhancing 3D map quality. Both simulations in ROS and real-world experiments in a testbed validate the method’s effectiveness, especially in large-scale missions where traditional techniques underperform.
Application
- Agriculture: Precision crop mapping.
- Disaster Management: Rapid mapping of disaster zones.
- Urban Mapping: Detailed mapping of city infrastructure.
Key Method
The system uses Voronoi Coverage for area partitioning, dynamically adjusting drone flight paths to ensure optimal coverage with minimal overlaps, while employing the angle-aware method to capture images from various viewing angles.
Conclusion
The approach improves both monitoring efficiency and map quality, significantly reducing drone travel time to unobserved areas in large-scale applications.
Publication: Muhammad Hanif, Takumi Shimizu, Zhiyuan Lu, Masaya Suenaga, and Takeshi Hatanaka. (2024). “Efficient Angle-Aware Coverage Control for Large-Scale Map Reconstruction using Drone Networks.” SICE Journal of Control, Measurement, and System Integration, 17(1): 144-155. [Paper]
Video - Simulation Verification: