Real-time Map Feedback Coverage for 3D Reconstruction using Drone
Coverage control with real-time mesh feedback using UAVs for 3D reconstruction. 

Coverage control with real-time mesh feedback using UAVs for 3D reconstruction.
Coverage control algorithm for multiple UAVs to be used in 3D map reconstruction applications. 
Drone coverage control methods for dynamic target tracking applications by adapting the drone’s altitude and detection model in real-time. ![]()
Control methods for autonomous ship operation in a port with safety certificates using a combined approach of Model Predictive Control (MPC) and Control Barrier Function (CBF). 
Multi-Robot Task Allocation algorithm for multiple UAVs and UGVs for radiation monitoring application in a thermosolar plant. 
Autonomous Hybrid Underwater Glider (HUG) for long-distance surveillance missions. Underwater autonomous platform that combined movement of AUV (Autonomous Underwater Vehicle) and AUG (Autonomous Underwater Glider). 
Low cost underwater vehicle with controlled buoyant mechanics and moving mass mechanism. 
Deep learning-based classifier for diabetic retinopathy severity grading. 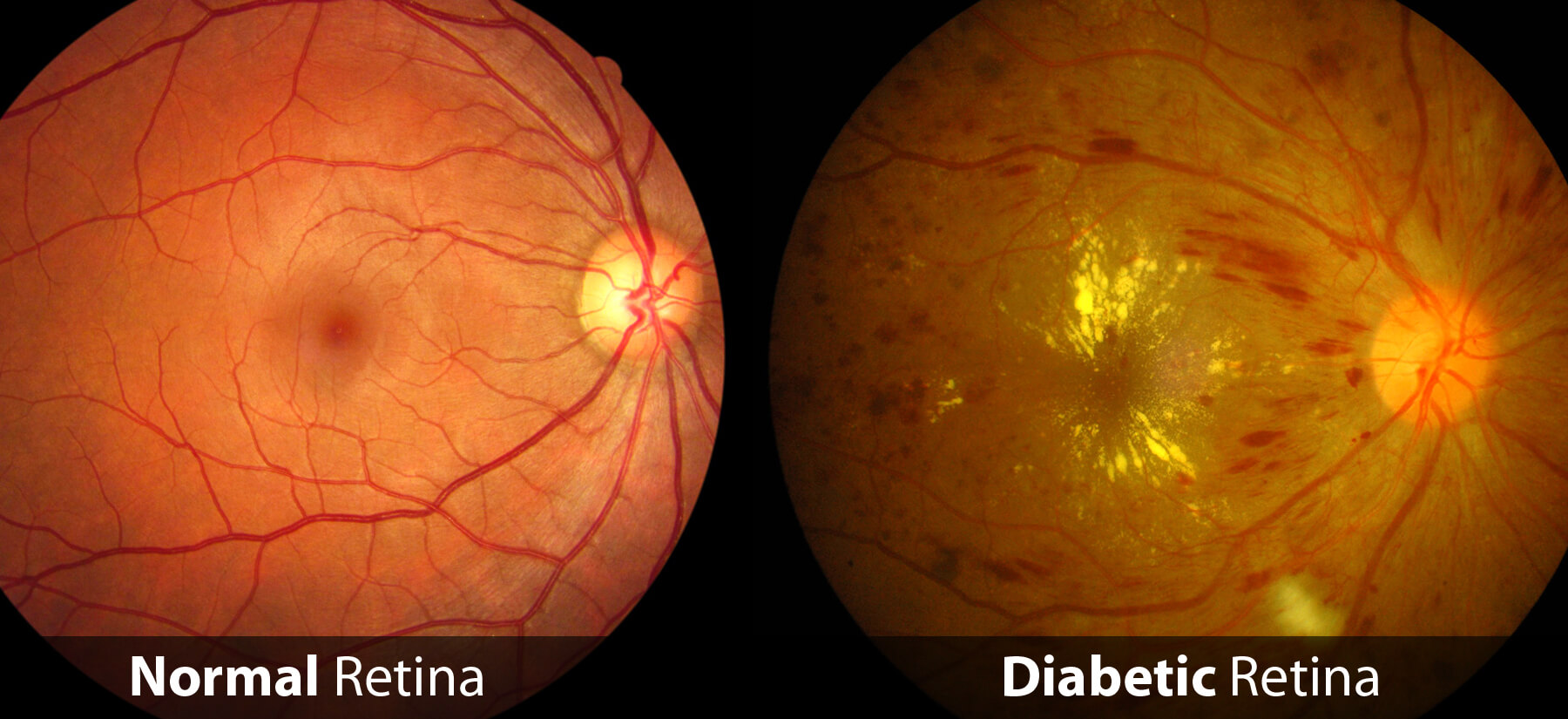
Deep learning-based classifier for brain tumor detection. 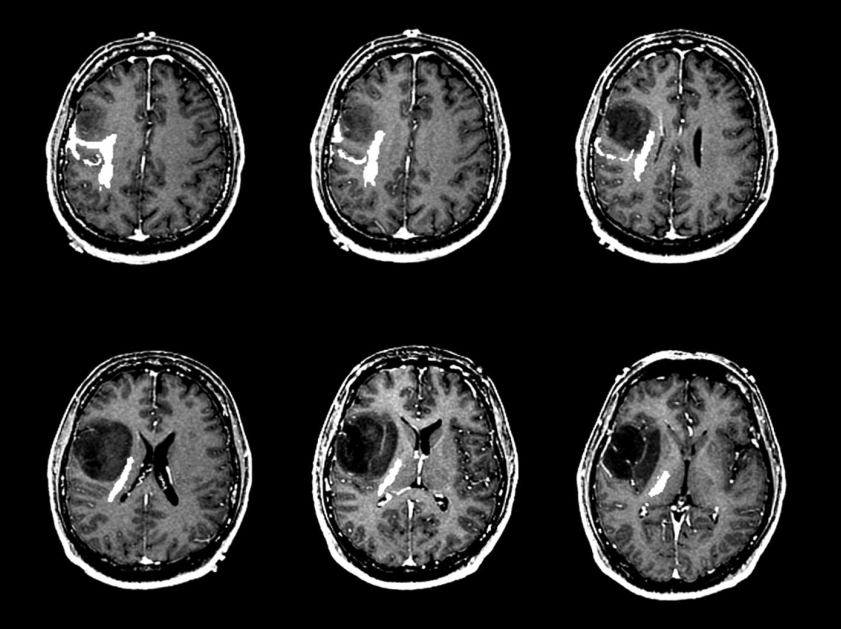
Development of HALE (High Altitude Long Endurance) UAV with a wingspan of 21 meters. 
Early preparation before flying the HALE UAV involved flying a mini-UAV with a wingspan of 1.5 meters to an altitude of 10,000 feet above ground level. The UAV was equipped with a weather monitoring device as well as a real-time video monitoring system. 
Compact and easily deployable fixed-wing unmanned aerial vehicle which can be launched from tube. 
Hybrid fixed-wing UAV with vertical take-off and landing capability. 
Published in International Conference on Intelligent Unmanned Systems, 2018
Recommended citation: Ahmad Fadlillah Muzammil, Nurhayyan Halim Rosid, Muhammad Hanif, Naufalino Fadel, Nathan, Tobias S., Tegar S., M.Agoes Moelyadi, and Agus Budiyono. (2018). "Design and Development of Tube-Launched Unmanned Aerial Vehicle." In International Conference on Intelligent Unmanned Systems, August.
Download Paper
Published in Bandung Institute of Technonology, 2018
Recommended citation: Muhammad Hanif. (2018). "Design and Implementation of Control System in Hybrid Underwater Glider Vehicle in ROS Environment." B.Sc Thesis. Department of Electrical Engineering. Bandung Institute of Technology. July 2018.
Download Paper
Published in World Congress on Medical Physics and Biomedical Engineering 2018, 2019
Recommended citation: Abiwinanda, Nyoman, Muhammad Hanif, S. Tafwida Hesaputra, Astri Handayani, and Tati Rajab Mengko. (2019). "Brain tumor classification using convolutional neural network." In World Congress on Medical Physics and Biomedical Engineering 2018: June 3-8, 2018, Prague, Czech Republic (Vol. 1), pp. 183-189. Springer Singapore.
Download Paper
Published in 2020 IEEE REGION 10 CONFERENCE (TENCON), 2020
Recommended citation: Lazuardi, Rachmadio Noval, Nyoman Abiwinanda, Tafwida Hesaputra Suryawan, Muhammad Hanif, and Astri Handayani. (2020). "Automatic diabetic retinopathy classification with efficientnet." In 2020 IEEE REGION 10 CONFERENCE (TENCON), pp. 756-760. IEEE.
Download Paper
Published in 2022 European Control Conference (ECC), 2022
Recommended citation: Martin, Javier G., Muhammad Hanif, Takeshi Hatanaka, Jose M. Maestre, and Eduardo F. Camacho. (2022). "Predictive receding-horizon multi-robot task allocation with moving tasks." In 2022 European Control Conference (ECC), pp. 2030-2035. IEEE.
Download Paper
Published in Tokyo Institute of Technonology, 2022
Recommended citation: Muhammad Hanif. (2022). "Real-Time Optimization for Dynamic Multiple Target Allocation and Tracking with Heteregeneous Robotic Systems." M.Eng. Thesis. Department of System and Control Engineering. Tokyo Institute of Technology. August 2022.
Download Paper
Published in Solar Energy, 2023
Recommended citation: Martin, J. G., Muhammad Hanif, T. Hatanaka, J. M. Maestre, and E. F. Camacho. (2023). "Predictive receding-horizon multi-robot task allocation applied to the mapping of direct normal irradiance in a thermosolar power plant." Solar Energy 263: 111911.
Download Paper
Published in Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, 2023
Recommended citation: Asavasirikulkij, Chanun, and Muhammad Hanif. (2023). "Human Workload Evaluation of Drone Swarm Formation Control using Virtual Reality Interface." In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, pp. 132-136.
Download Paper
Published in IFAC-PapersOnLine, 2023
Recommended citation: Otsuki, Satoshi, Naoki Hatta, Muhammad Hanif, Takeshi Hatanaka, and Kenichi Nakashima. (2023). "Hierarchical Vessel Autonomous Operation in a Port with Safety Certificates: Combined MPC and CBF Approach." In IFAC-PapersOnLine 56(2): 3138-3145.
Download Paper
Published in Springer Nature, 2024
Recommended citation: Otsuki, Satoshi, Naoki Hatta, Muhammad Hanif, Riku Funada, Kenichi Nakashima, and Takeshi Hatanaka. (2024). "Hierarchical Vessel Safe Operation in a Port through CBF, MPC, and RRT-like Spatiotemporal Path Planning." Nonlinear and Constrained Control - Applications, Synergies, Challenges and Opportunities, E. Garone, I.V. Kolmanovsky, and T.W. Nguyen (eds). Springer Nature, to be published.
Published in SICE Journal of Control, Measurement, and System Integration, 2024
Recommended citation: Muhammad Hanif, Takumi Shimizu, Zhiyuan Lu, Masaya Suenaga, and Takeshi Hatanaka. (2024). "Efficient Angle-Aware Coverage Control for Large-Scale Map Reconstruction using Drone Networks." SICE Journal of Control, Measurement, and System Integration 17(1): 144-155.
Download Paper
Published in SICE Journal of Control, Measurement, and System Integration, 2024
Recommended citation: Zhiyuan Lu, Muhammad Hanif, Takumi Shimizu, and Takeshi Hatanaka. (2024). "Angle-Aware Coverage with Camera Rotational Motion Control." SICE Journal of Control, Measurement, and System Integration 17(1): 211–221.
Download Paper
Published in SICE Annual Conference, 2024
Recommended citation: Muhammad Hanif and Takeshi Hatanaka. (2024). "Real-time Adaptation of Drone Altitude and Object Detection Model for Moving Target Tracking." SICE Annual Conference 2024.
Download Paper
Published in SICE Annual Conference, 2024
Recommended citation: Lu, Zhiyuan, Muhammad Hanif, and Takeshi Hatanaka. (2024). "Angle-Aware Full 3D Coverage Control with ADMM-based Dynamic Assignment of Charging Stations." SICE Annual Conference 2024.
Download Paper
Published in 2025 European Control Conference (ECC), 2025
Recommended citation: Muhammad Hanif, Takumi Sumino, Kuniaki Uto, Daisuke Ichihashi, Kelvin Cheng, Takeshi Hatanaka. (2025). "Impact of Real-time Map Feedback on Coordinated Image Sampling for 3D Reconstruction." In 2025 European Control Conference (ECC), to be presented.
Published in 2025 European Control Conference (ECC), 2025
Recommended citation: Masaya Suenaga, Muhammad Hanif, Kuniaki Uto, Takeshi Hatanaka. (2025). "Hierarchical Multi-Robot Data Sampling for Environmental State Estimation through Online Gaussian Process." In 2025 European Control Conference (ECC), to be presented.
Published:
Sharing Session about “Computationally Inexpensive UAV/UGV Allocation for Radiation Monitoring over Mega Solar Power Plants”.
Published:
Poster Sharing Session about “Real-time Adaptation of Drone Altitudes and Object Detection Models for Aerial Target Tracking”.
Published:
Poster Sharing Session about “Human-collaborative Control of Drone Networks with Virtual Reality”.
Published:
Poster Sharing Session about “Empowering Precision Agriculture: Efficient Angle-Aware Coverage for 3D Structure Reconstruction with Drone Teams”.
Published:
Poster Sharing Session about “Empowering Precision Agriculture: Efficient Angle-Aware Coverage for 3D Structure Reconstruction with Drone Teams”.
Published:
International Conference in Kochi, Japan about “Real-time Adaptation of Drone Altitude and Object Detection Model for Moving Target Tracking”.
Undergraduate course, Bandung Institute of Technology, School of Electrical Engineering and Informatics, 2018
I was the TA for EL4125 - Digital Image Processing Fall of 2018, which was taught by Prof. Tati Rajab and Dr. Astri Handayani.
Graduate course, Tokyo Institute of Technology, Dept. of System and Control Engineering, 2022
I was the TA for SCE.Z401 - Cyber Physical Innovation Fall of 2022.
Graduate course, Tokyo Institute of Technology, Dept. of System and Control Engineering, 2024
I was the TA for SCE.C451 - Optimal Control Spring of 2024, which was taught by Prof. Takeshi Hatanaka.